Einführung Maschinenlernen & KI
Datasets:
Kaggle_Titanic_train
Mall_Customers
Addon: PCA-Workshop zur Dimensionsreduktion
Addon: PCA_Workshop_OrangeProjects
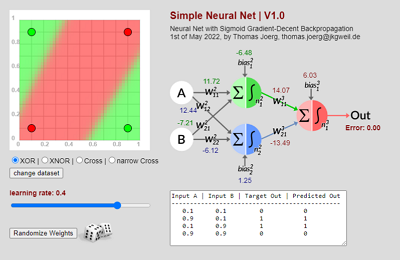
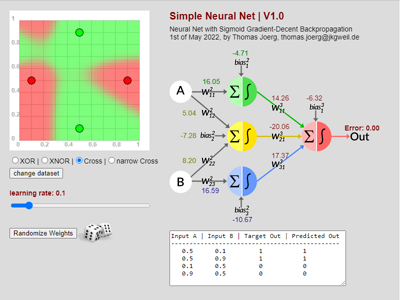
Some Simple Neural Nets with Gradient Descent Algorithm
Tutorial for „IntroductionOverview_NeuralNets_5Sept22
1. Linear Regression
(ML-Algorithm using Batch Gradient Descent)
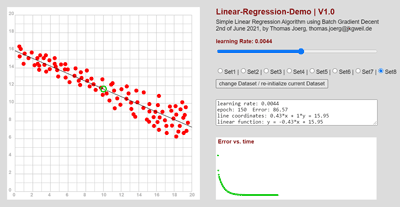
https://iludis.de/LinearRegression/index.html
2. kNN (k-nearest-neighbour)
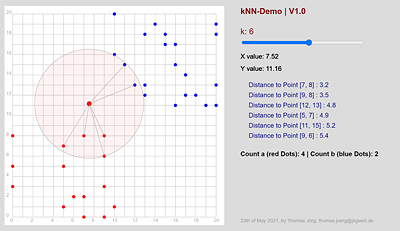
https://iludis.de/kNNDemo/index.html
3. SVM (Hard-Margin Support Vector Machine)
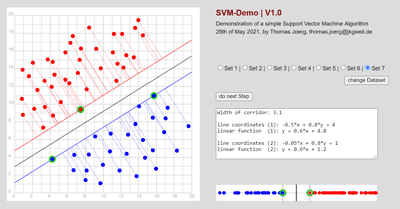
https://iludis.de/svmDemo/index.html
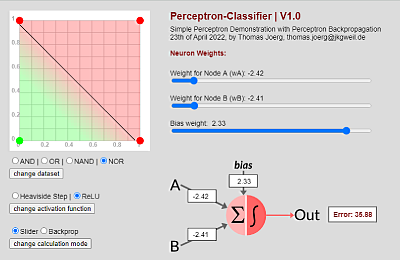
4. NeuralNet-Dinosaur: Perceptron with SGD
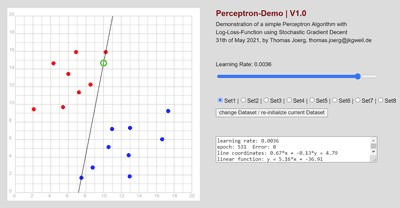
https://iludis.de/Perceptron/index.html
5. k-Means-Clustering
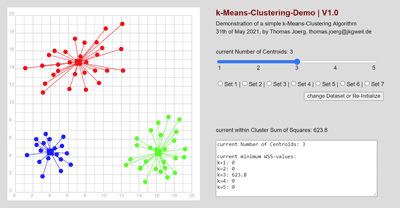
https://iludis.de/kMeansClustering/index.html
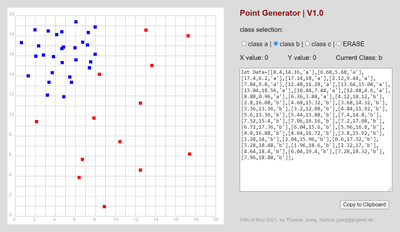
6. no-AI, but helper-App:
generate points for export